Publications
2025
-
-
 LiteVLoc: Map-Lite Visual Localization for Image Goal Navigation
LiteVLoc: Map-Lite Visual Localization for Image Goal NavigationThis paper introduces LiteVLoc, a hierarchical visual localization framework using lightweight topometric maps for efficient, precise camera pose estimation, validated through experiments in simulated and real-world scenarios.
International Conference on Robotics and Automation (ICRA), 2025 -
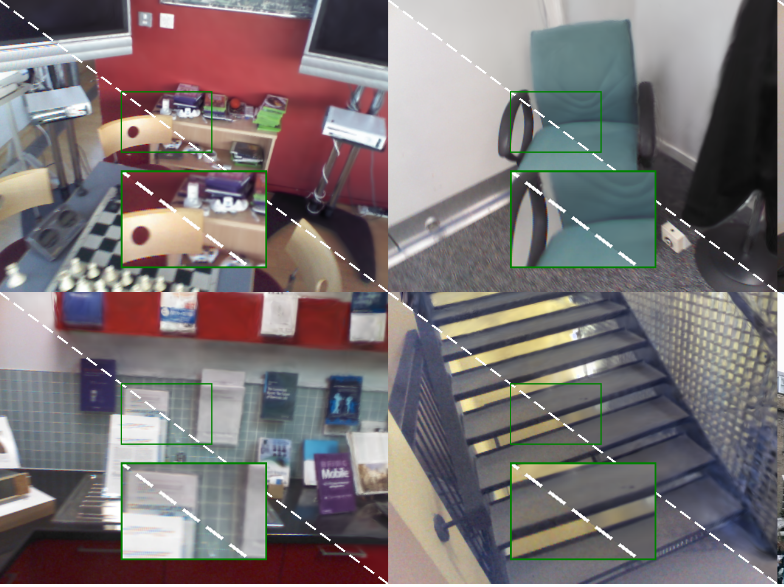 LoGS: Visual Localization via Gaussian Splatting with Fewer Training Images
LoGS: Visual Localization via Gaussian Splatting with Fewer Training ImagesWe present LoGS, a visual localization framework using 3D Gaussian Splatting (GS) for high-precision 6-DoF camera pose estimation. By integrating SfM-based GS mapping with image retrieval, PnP initialization, and analysis-by-synthesis refinement, LoGS achieves state-of-the-art accuracy and robustness in few-shot scenarios across four large-scale datasets.
International Conference on Robotics and Automation (ICRA), 2025 -
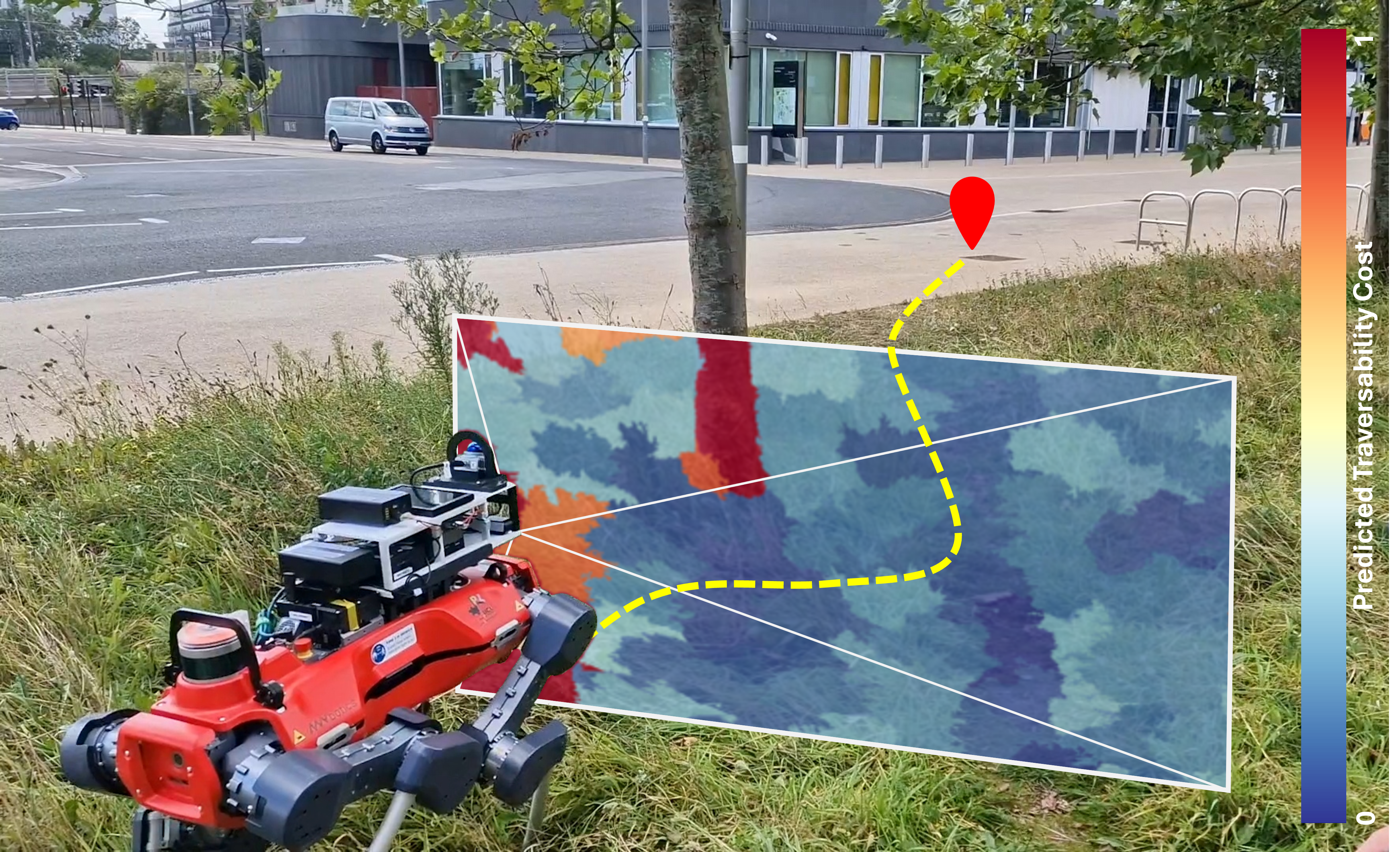 Watch your STEPP: Semantic Traversibility Estimation using Pose Projected Features
Watch your STEPP: Semantic Traversibility Estimation using Pose Projected FeaturesWe present a terrain traversability estimation method for legged robots that learns from human walking demonstrations using DINOv2 vision Transformer embeddings and an encoder-decoder MLP. By detecting anomalies through reconstruction error minimization, our approach enables robust navigation in unstructured environments, validated via real-wrld ANYmal.
International Conference on Robotics and Automation (ICRA), 2025 -
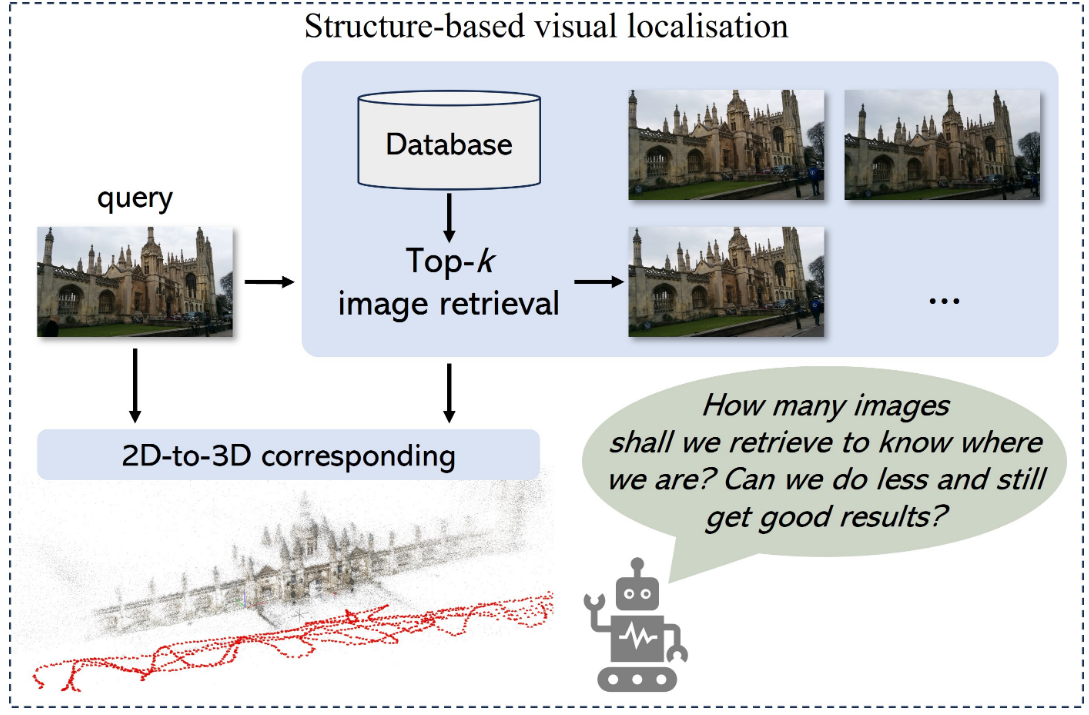 AIR-HLoc: Adaptive Retrieved Images Selection for Efficient Visual Localisation
AIR-HLoc: Adaptive Retrieved Images Selection for Efficient Visual LocalisationWe propose AIR-HLoc, an adaptive image retrieval strategy for hierarchical localization that dynamically adjusts the number of retrieved images (k) based on global descriptor similarity, reducing feature matching time by up to 30% while maintaining state-of-the-art accuracy across indoor and outdoor datasets.
International Conference on Robotics and Automation (ICRA), 2025






2024
-
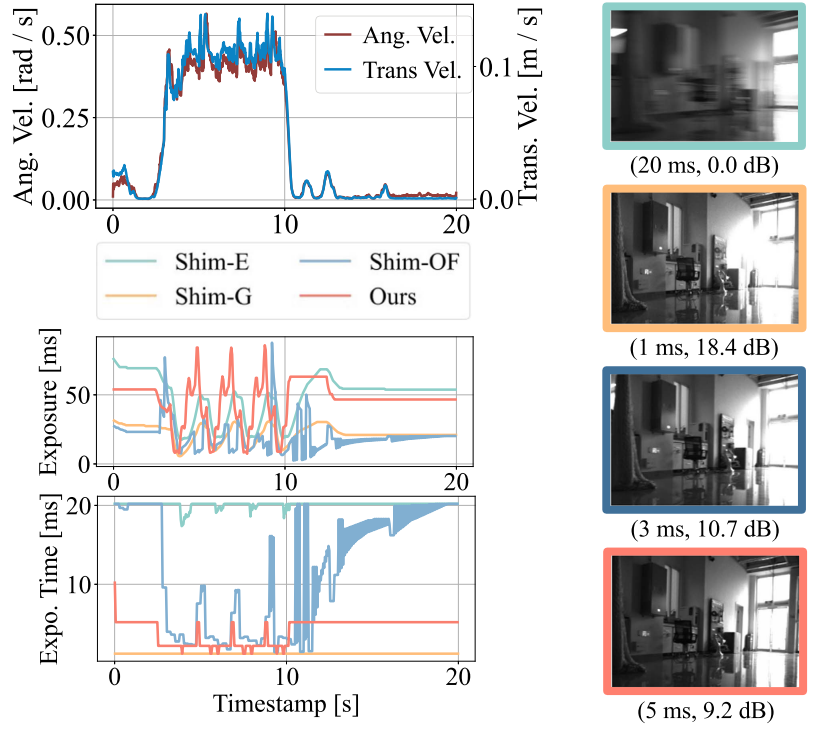 VirCap: Virtual Camera Exposure Control Based on Image Photometric Synthesis for Visual SLAM ApplicationIEEE/ASME Transactions on Mechatronics, 2024
VirCap: Virtual Camera Exposure Control Based on Image Photometric Synthesis for Visual SLAM ApplicationIEEE/ASME Transactions on Mechatronics, 2024 -
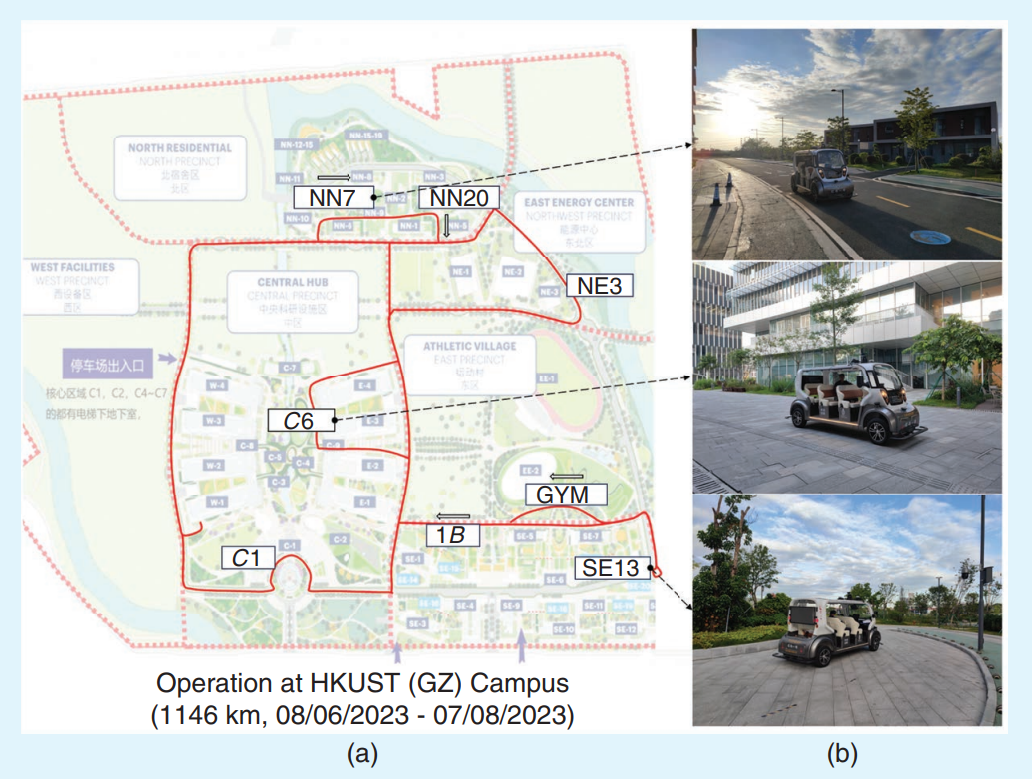 Enhancing Campus Mobility: Achievements and Challenges of the Snow Lion Autonomous ShuttleIEEE Robotics & Automation Magazine, 2024
Enhancing Campus Mobility: Achievements and Challenges of the Snow Lion Autonomous ShuttleIEEE Robotics & Automation Magazine, 2024 -
 FusionPortableV2: A Unified Multi-Sensor Dataset for Generalized SLAM Across Diverse Platforms and Scalable Environments
FusionPortableV2: A Unified Multi-Sensor Dataset for Generalized SLAM Across Diverse Platforms and Scalable EnvironmentsWe propose a multi-sensor dataset that addresses the generalization challenge of SLAM algorithms by providing diverse sensor data, motion patterns, and environmental scenarios across 27 sequences from four platforms, totaling 38.7km. The dataset, which includes GT trajectories and RGB point cloud maps, is used to evaluate SOTA SLAM algorithms and explore its potential in other perception tasks, demonstrating its broad applicability in advancing robotic research.
International Journal of Robotics Research (IJRR), 2024 -
 Real-Time Metric-Semantic Mapping for Autonomous Navigation in Outdoor Environments
Real-Time Metric-Semantic Mapping for Autonomous Navigation in Outdoor EnvironmentsWe proposed an online and large-scale semantic mapping system that uses LiDAR-Visual-Inertial sensing to create a real-time global mesh map of outdoor environments, achieving high-speed map update and integrating the map into a real-world vehicle navigation system.
IEEE Transactions on Automation Science and Engineering (T-ASE), 2024






2023
-
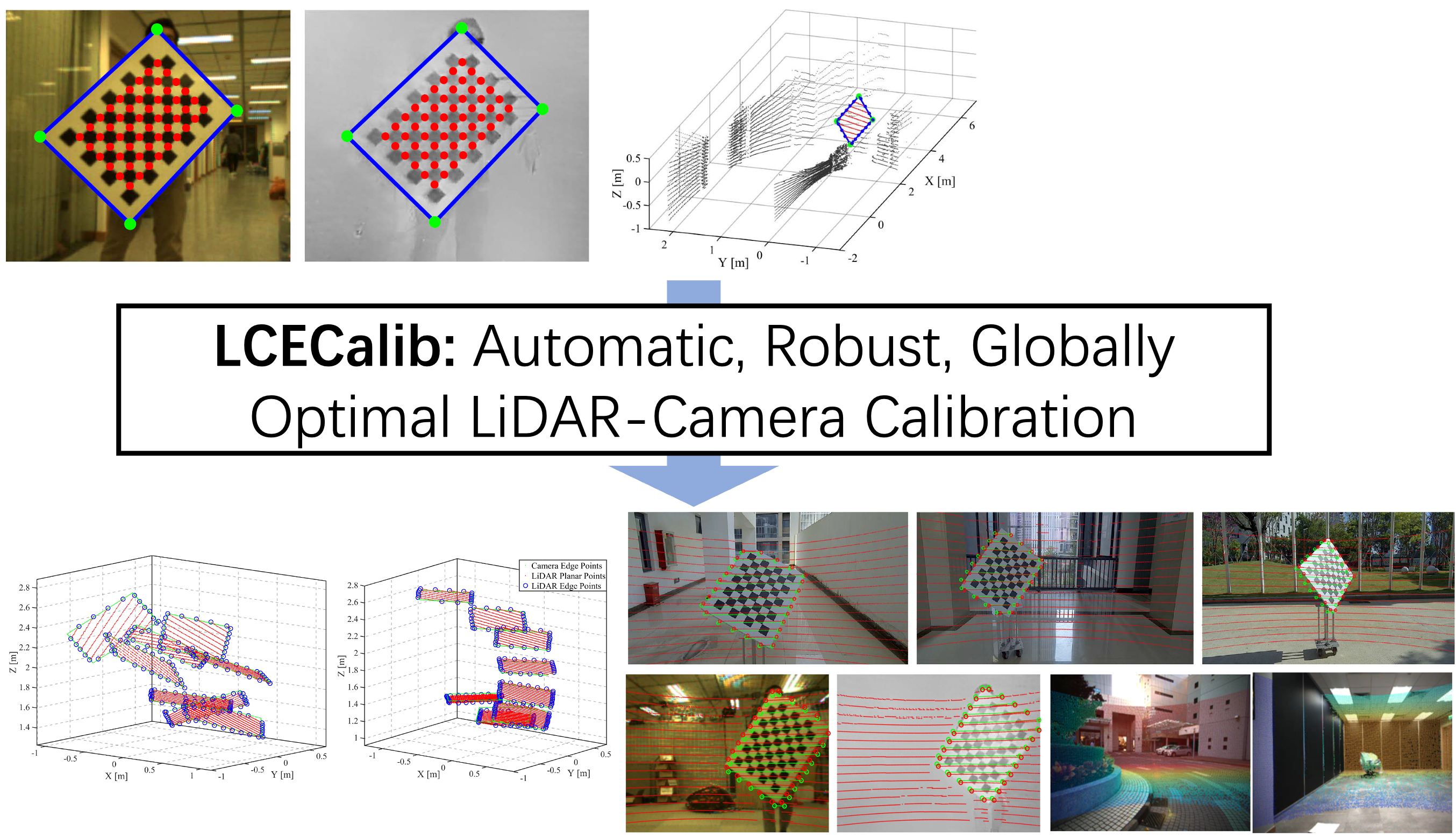 LCE-Calib: Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With a Globally Optimal Solution
LCE-Calib: Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With a Globally Optimal SolutionWe proposed an automatic checkerboard-based approach for calibrating extrinsics between a LiDAR and a frame/event camera by introducing a unified globally optimal solution for calibration optimization.
IEEE/ASME Transactions on Mechatronics (T-MECH), 2023


2022






2021






2020
-
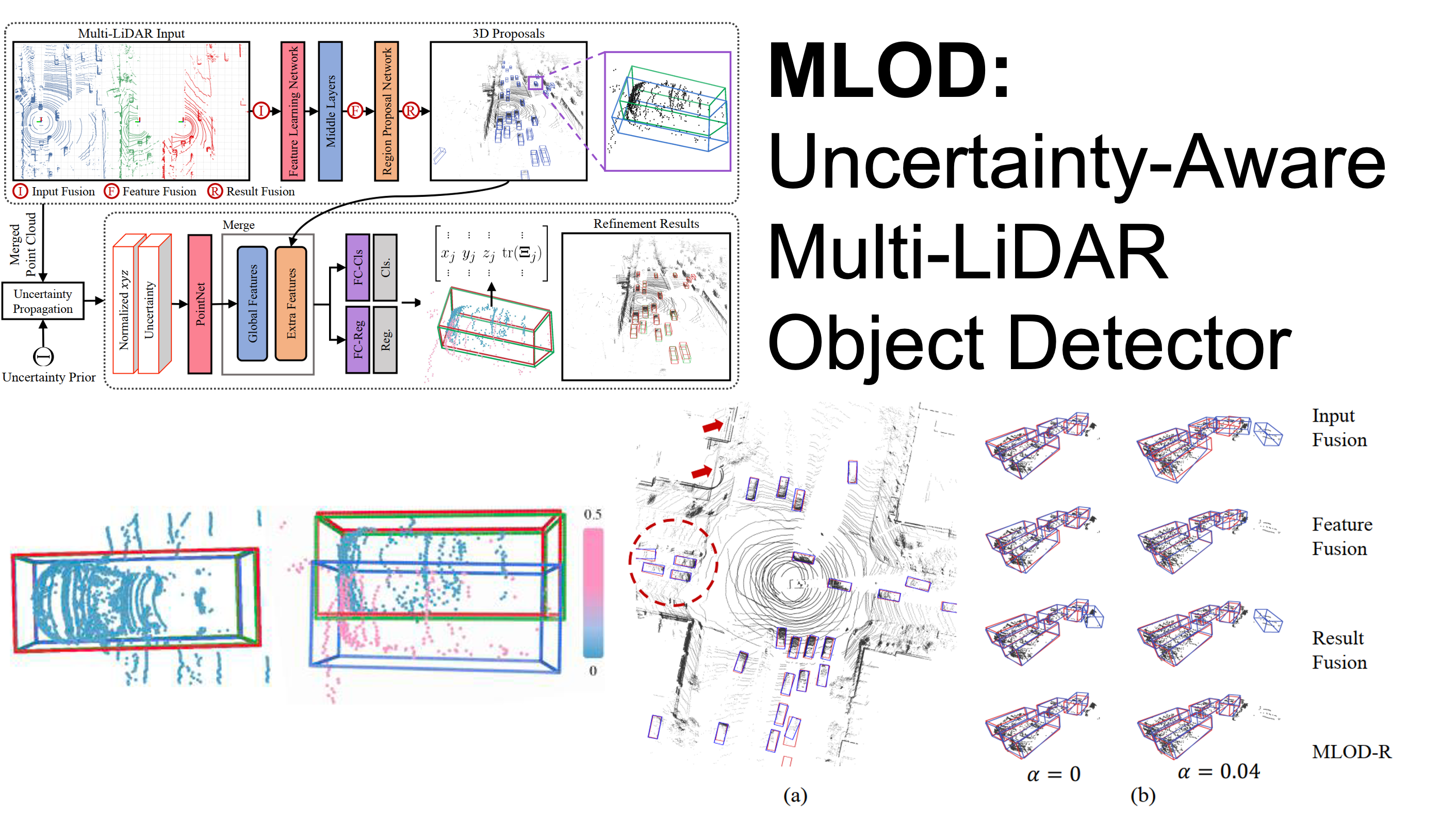 MLOD: Awareness of Extrinsic Perturbation in Multi-LiDAR 3D Object Detection for Autonomous Driving
MLOD: Awareness of Extrinsic Perturbation in Multi-LiDAR 3D Object Detection for Autonomous DrivingWe proposed a two-stage and uncertainty-aware multi-LiDAR 3D object detection system that fuses multi-LiDAR data and explicitly addresses extrinsic perturbation on extrinsics.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020

2019
-
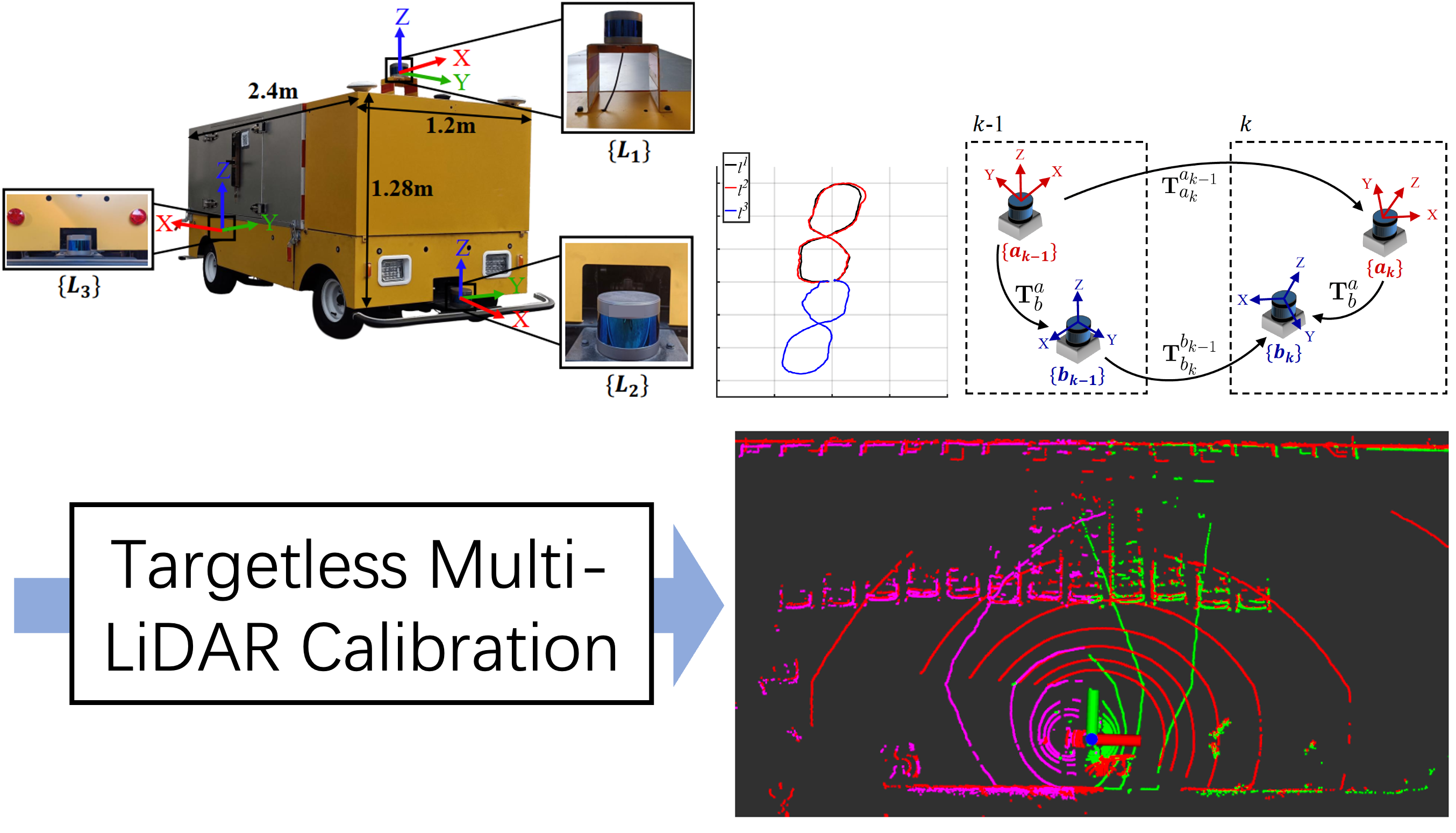 Automatic Calibration of Multiple 3D LiDARs in Outdoor Environment
Automatic Calibration of Multiple 3D LiDARs in Outdoor EnvironmentWe proposed an automatic multi-LiDAR calibration system that requires no calibration target or manual initialization, achieving high reliability and accuracy with minimal rotation and translation errors for mobile platforms.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019





{kind=link}
{kind=link}
{kind=link}
{kind=link}